Home › Forums › Fórum Detecção de Movimentos com Python e OpenCV › Linhas delimitadoras
- This topic has 5 replies, 2 voices, and was last updated 3 years, 9 months ago by
Dalton Vargas.
-
AuthorPosts
-
30 de setembro de 2022 at 21:24 #36921
Olá, boa noite.
Estou desenvolvendo um projeto onde preciso realizar uma contagem de objetos em movimento na horizontal. No vídeo foi apresentado como traçar as linhas “line_IN” e “line_OUT” baseadas no ROI, como faço para traçar essas linhas horizontalmente? Ou seja, como obtenho as coordenadas laterais do ROI?
3 de outubro de 2022 at 07:29 #37187Olá Pedro!
Cada linha é definida usando 2 pontos de coordenadas, o ponto onde a linha irá iniciar e o ponto onde a linha irá terminar. O ponto inicial são as coordenadas representadas como tuplas de dois valores, ou seja, valor da coordenada X , valor da coordenada Y. Para o ponto final também são coordenadas X e Y.
Para traçar linhas na vertical, basta passar as coordenadas dos pontos na vertical.
Por exemplo usando a função cv2.line() desenhe uma linha do ponto A(x1, y1) ao ponto B(x2, y2), onde A e B representam quaisquer dois pontos na imagem. Olhe para o canto superior esquerdo da imagem, você encontrará a origem do sistema de coordenadas xy.
- O eixo x representa a direção horizontal ou as colunas da imagem.
- O eixo y representa a direção vertical ou as linhas da imagem.
O primeiro parâmetro que devemos alimentar na função é a imagem na qual queremos desenhá-la.
O segundo parâmetro que devemos especificar é onde a linha começa. Isso é especificado através do atributo pt1 (representando o ponto 1). Queremos que nossa linha, neste exemplo, comece no ponto (100.300).
O terceiro parâmetro que devemos especificar é onde a linha termina. Isso é especificado através do atributo pt2 (representando o ponto 2). Neste exemplo, queremos que nossa linha termine em (400.300). Isso resulta em um comprimento horizontal de 300.
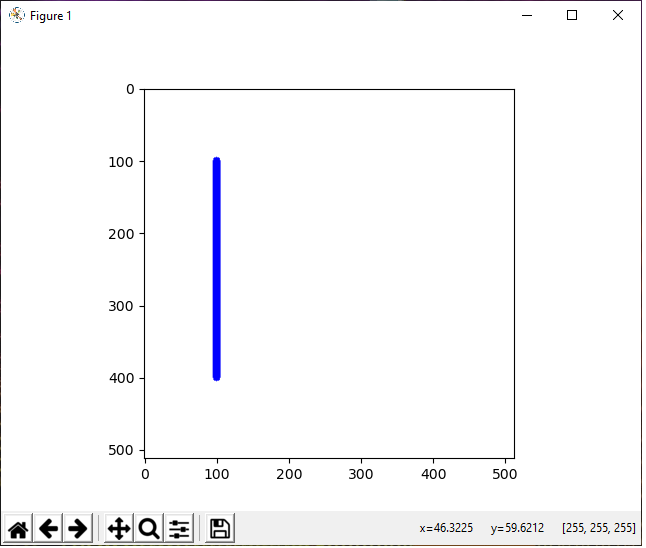
Agora que você tem as linhas delimitadoras na vertical, então precisa adaptar o algoritmo para analisar os movimentos que transitam verticalmente, ou seja, que se movem da esquerda para a direita ou vice-versa. Por exemplo se o objeto estiver se movendo da direira para a esquerda, quando ele cruzar a linha limite de saída você pode considerar como parâmetro a coordenada y do objeto detectado para definir quando ele cruzou a linha (quando um objeto se move na vertical, da direita para a esquerda, o valor da coordenada y vai diminuindo, já se o movimento for ao contrário então o valor da coordenada y do objeto detectado vai aumentando).
-
This reply was modified 3 years, 9 months ago by
4 de outubro de 2022 at 21:56 #37231Olá, boa noite. Obrigado pela resposta!
Me desculpe se eu estiver fazendo perguntas bobas, ainda sou iniciante no assunto. Eu consegui trabalhar com as linhas, porém agora, assim como você comentou, preciso adaptar o código para analisar movimentos no decorrer do eixo X.
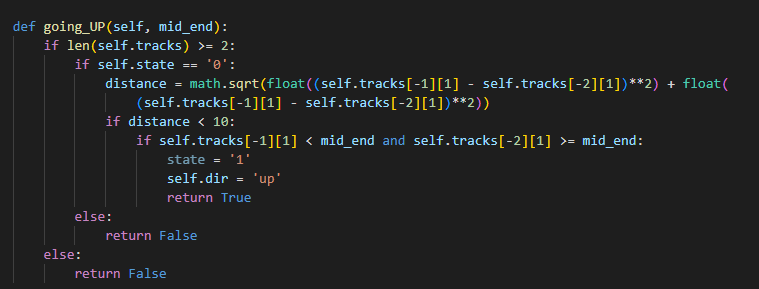
Vi que no código está disponibilizado as funções going_UP e going_Down, eu devo modificá-las a fim de se obter os movimentos laterais? Se sim, como poderia modificá-la?
Obrigado pela atenção.
 5 de outubro de 2022 at 06:58 #37232
5 de outubro de 2022 at 06:58 #37232Isso mesmo Pedro, perfeita a sua pergunta!
Precisa ajustar esta função na classe ou criar uma nova função, segue o script:
Também estou mandando abaixo o código completo com os ajustes necessários para analisar um objeto que se move na horizontal.
import numpy as np import cv2 import Class_HORIZONTAL as Object import time LINE_DOWN_COLOR = (232,162,0) BOUNDING_BOX_COLOR = (188,188,188) TRACKER_COLOR = (255,255,255) CENTROID_COLOR = (0, 128, 255) LINE_LIMIT_COLOR = (0, 128, 255) SAVE_IMAGE = True IMAGE_DIR = "./out" VIDEO_SOURCE = "teste.mp4" VIDEO_OUT = "result_H.mp4" # Limites da ROI a1, a2 = 370, 470 l1, l2 = 750, 900 font = cv2.FONT_HERSHEY_SIMPLEX cap = cv2.VideoCapture(VIDEO_SOURCE) hasFrame, frame = cap.read() fourcc = cv2.VideoWriter_fourcc(*"MP4V") writer = cv2.VideoWriter(VIDEO_OUT, fourcc, 25, (frame.shape[1], frame.shape[0]), True) # Exibir as propriedades do vídeo de entrada for i in range(19): print(i, cap.get(i)) h = a2 w = l2 frameArea = h*w areaTH = frameArea/250 print('Area Threshold', areaTH) # Linhas de entrada/saída line_down = int(1*(w/8)) in_down = int(l2) down_limit = int(l1+50) print("Blue line x:", str(line_down)) pt1 = [in_down, a1] pt2 = [in_down, a2] pts_L1 = np.array([pt1, pt2], np.int32) pts_L1 = pts_L1.reshape((-1, 1, 2)) pt7 = [down_limit, a1] pt8 = [down_limit, a2] pts_L4 = np.array([pt7, pt8], np.int32) pts_L4 = pts_L4.reshape((-1, 1, 2)) # Background Subtractor fgbg = cv2.createBackgroundSubtractorMOG2(detectShadows=False) # Filtros morfológicos kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2, 2)) kernelOp = np.ones((3, 3), np.uint8) kernelOp2 = np.ones((5, 5), np.uint8) kernelCl = np.ones((11, 11), np.uint8) def save_frame(frame, file_name, flip=True): # flip BGR to RGB if flip: cv2.imwrite(file_name, np.flip(frame, 2)) else: cv2.imwrite(file_name, frame) def main(): # # Variáveis cnt_down = 0 Objects = [] max_p_age = 5 pid = 1 frame_number = -1 while(cap.isOpened()): ret, frame = cap.read() roi = frame[a1:a2, l1:l2] cv2.rectangle(frame, (l1, a1), (l2, a2), BOUNDING_BOX_COLOR, 1) frame_number += 1 for i in Objects: i.age_one() # marcar cada detecção como um objeto ######################### # Estágio de pré-processamento # ######################### # Aplica bgs fgmask = fgbg.apply(roi) fgmask2 = fgbg.apply(roi) # Usando o método de binarização para remover sombras try: ret, imBin = cv2.threshold(fgmask, 200, 255, cv2.THRESH_BINARY) ret, imBin2 = cv2.threshold(fgmask2, 200, 255, cv2.THRESH_BINARY) # Opening (erode->dilate) mask = cv2.morphologyEx(imBin, cv2.MORPH_OPEN, kernelOp) mask2 = cv2.morphologyEx(imBin2, cv2.MORPH_OPEN, kernelOp) # Closing (dilate -> erode) mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, kernelCl) mask2 = cv2.morphologyEx(mask2, cv2.MORPH_CLOSE, kernelCl) mask = cv2.dilate(mask, kernel, iterations=2) mask2 = cv2.dilate(mask2, kernel, iterations=2) except: print('OBJECT:', cnt_down) break (img, contours0, hierarchy) = cv2.findContours( mask2, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) for cnt in contours0: area = cv2.contourArea(cnt) if area > areaTH: M = cv2.moments(cnt) cx = int(M['m10']/M['m00']) cy = int(M['m01']/M['m00']) x, y, w, h = cv2.boundingRect(cnt) new = True if cx in range(down_limit): for i in Objects: if abs(x-i.getX()) <= w and abs(y-i.getY()) <= h: new = False i.updateCoords(cx, cy) if i.going_DOWN(line_down) == True: cnt_down += 1 if SAVE_IMAGE: save_frame(roi, IMAGE_DIR + "/mask_%04d.png" % frame_number, flip=False) print("ID:", i.getId(),'crossed going down at', time.strftime("%c")) break if i.getState() == '1': if i.getDir() == 'down' and i.getX() < down_limit: i.setDone() if i.timedOut(): index = Objects.index(i) Objects.pop(index) del i if new == True: p = Object.MyObject(pid, cx, cy, max_p_age) Objects.append(p) pid += 1 cv2.circle(roi, (cx, cy), 5, CENTROID_COLOR, -1) img = cv2.rectangle(roi, (x, y), (x+w, y+h), TRACKER_COLOR, 2) for i in Objects: cv2.putText(roi, str(i.getId()), (i.getX(), i.getY()), font, 0.3, i.getRGB(), 1, cv2.LINE_AA) str_down = 'OBJECTS: ' + str(cnt_down) frame = cv2.polylines(frame, [pts_L1], False, LINE_DOWN_COLOR, thickness=2) frame = cv2.polylines(frame, [pts_L4], False, LINE_LIMIT_COLOR, thickness=2) cv2.putText(frame, str_down, (10, 50), font, 1, (255, 255, 255), 3, cv2.LINE_AA) cv2.putText(frame, str_down, (10, 50), font, 1, (232,162,0), 2, cv2.LINE_AA) cv2.imshow('Frame', frame) # cv2.imshow('Mask', mask) writer.write(frame) k = cv2.waitKey(30) & 0xff if k == 27: break writer.release() cap.release() cv2.destroyAllWindows() main()-
This reply was modified 3 years, 9 months ago by
-
This reply was modified 3 years, 9 months ago by
-
This reply was modified 3 years, 9 months ago by
5 de outubro de 2022 at 21:12 #37237Olá, boa noite. Mais uma vez muito obrigado pelos esclarecimentos e pelo conhecimento compartilhado.
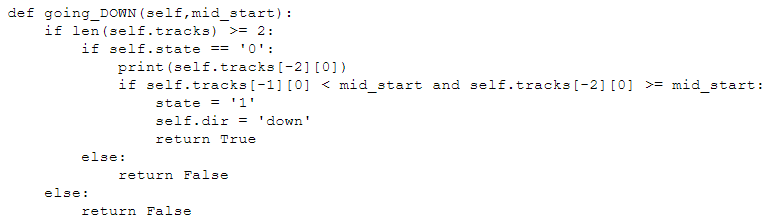
Apenas fiquei com uma dúvida em relação ao código. A função contida na imagem que você disponibilizou (imagem a seguir) realiza os cálculos para objetos que estão se movendo da direita para a esquerda? E o “import Class_HORIZONTAL as Object” (do código a cima), é equivalente ao “import validator” do código trabalhado em aula?
Obrigado!
6 de outubro de 2022 at 14:43 #37247Isso mesmo Pedro, a função analisa os movimentos da direita para a esquerda, e o import Class_HORIZONTAL as Object é apenas um pseudocódigo equivalente ao import validator, exato!
-
AuthorPosts
- You must be logged in to reply to this topic.