
Olá caro leitor, finalmente vamos finalizar a série de posts sobre como simular emoções em agentes. Porém, vale ressaltar que não irei abordar os robôs considerados humanóides, aqueles que são mais parecidos com os seres humanos. Nesta última parte, irei mencionar alguns dos agentes robóticos considerados simples, porém, através dos resultados de estudos de pesquisa, conseguiram fazer com que fosse criada a percepção de que eles tinham emoções. Caso ainda não tenha lido os outros posts, clique aqui para o primeiro e aqui para o segundo post.


O primeiro exemplo que irei citar deste tipo de robô, é uma esfera, uma bolinha que brilha e vibra. Sim, isso mesmo, uma bola pequena que emite luz que consegue fazer que as pessoas achem que ela tem emoções. Esse robô, que se bem utilizado consegue fazer isso, é chamado de Sphero. Essa bolinha, desenvolvida pela Sphero Inc. é programável para ter comportamentos de acordo com a necessidade do programador, tem sensores como giroscópio e acelerômetro e uma velocidade de dois metros por segundo. Para ter uma atração maior, a empresa teve uma jogada de marketing, onde criou uma versão do robô com o design do famoso BB8 da série de filmes Star Wars. Certo, mas como os pesquisadores conseguem fazer com que esse agente fosse percebido como algo que sente emoção? No trabalho intitulado “It’s Not the Way You Look, It’s How You Move: Validating a General Scheme for Robot Affective Behaviour” [1], os autores fizeram estudos comparando dois tipos de robôs, um era o Sphero e outro era mais articulado com braços. No estudo, eles testaram se ambos os robôs conseguiam expressar emoções perceptiveis pelos participantes. Para o Sphero, os autores manipularam o sentido do movimento (frente, trás, em linha reta ou em curva), velocidade e vibrar. Por exemplo, para a expressão de felicidade a bolinha deveria vibrar fortemente por dois segundos, se mover para frente em uma trajetória de curva por três segundos e vibrar rapidamente, finalizando assim o comportamento de alegria. Os autores encontraram evidências de que os movimentos utilizados fizeram com que o robô conseguisse comunicar sinais emocionais para os participantes. O Sphero, com seus recursos de ter leds, capacidade de vibrar e se movimentar, pode ser utilizado para outros tipos de objetivos, por exemplo, essa esfera já foi utilizada para medir o seu impacto com crianças com autismo [2,3], obtendo resultados bem interessantes.
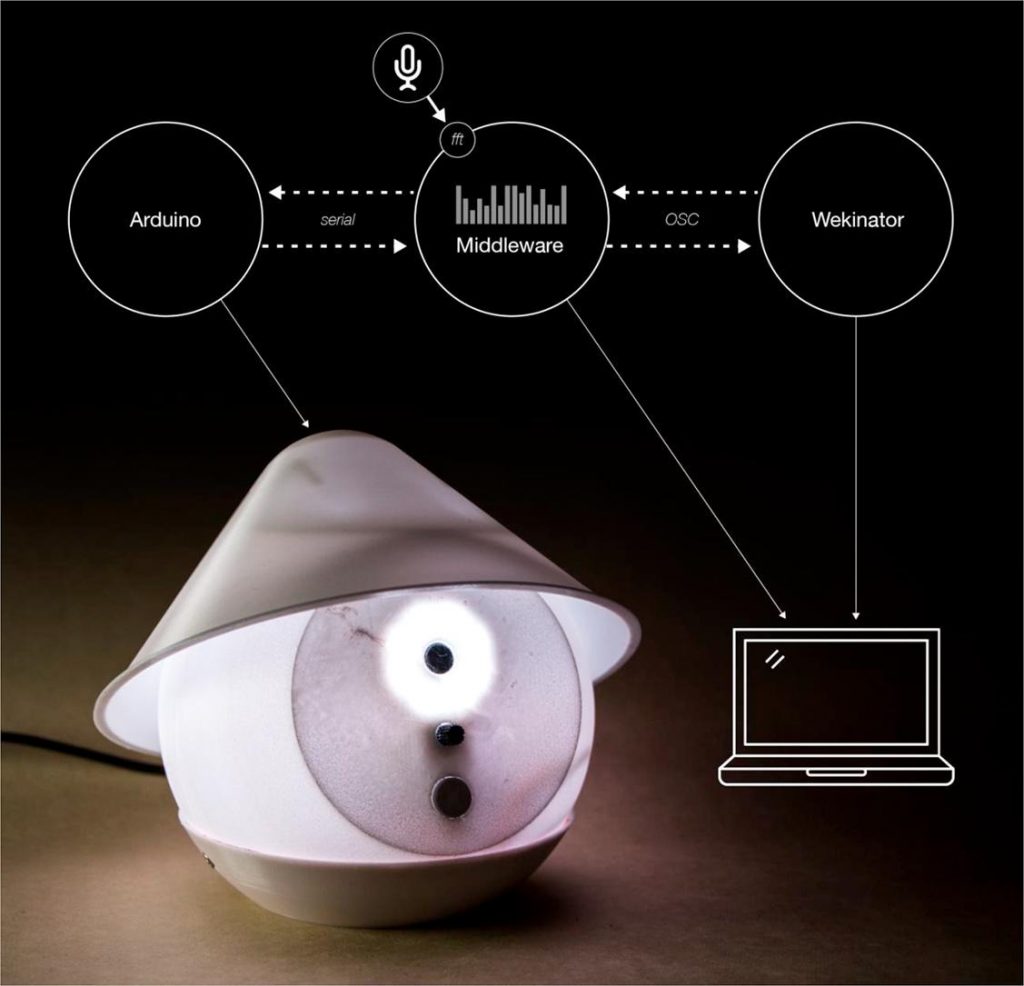
Em outro trabalho [4], os autores colocaram um chapeuzinho em um robô, parecido com o Sphero, que denominaram de Shybo e utilizaram o movimento desta vestimenta juntamente com cores, para ser ativado de acordo com sons. A pessoa consegue programar qual a reação que determinado som acarreta no Shybo. Dessa forma, foi possível transmitir os estados emocionais de ativo e assustado.

O robô Cozmo desenvolvido pela Anki, é outro exemplo de um agente considerado simples, que utiliza o recurso sons, movimentos e de uma pequena tela que apresenta apenas olhinhos que demonstra o que está sentindo. Já mencionei seu irmão mais recente chamado Vector em outro post, porém, eles são bem parecidos. O Cozmo usa visão computacional para identificar seu dono e os obstáculos que estão na sua frente. E, foi considerado um dos primeiros robôs com inteligência artificial juntamente com emoções. Além disso, suas emoções estão conectadas com tudo que acontece no seu exterior, por exemplo, ele fica feliz quando ganha um jogo, ou fica triste quando o seu dono fica muito tempo sem interagir com ele. Já tive a sorte de ficar com um Cozmo por algumas horas, e posso garantir, foram horas muito divertidas, interessantes e de deixar a pessoa de boca aberta com a capacidade desse robozinho, fazendo a pessoa pensar que ele tem sentimentos verdadeiros!!
Um outro robô, que foi lançado recentemente, acredito que em 2019, é o Mario Lego, isso mesmo, o famoso Super Mario Bros em Lego!!!! Esse robozinho tem um acelerômetro, giroscópio, sensor que lê cores, emite sons e telas nos olhos, boca e barriga que conseguem mostrar os possiveis estados emocionais. Não encontrei estudos que comprovaram a eficácia deste robô em demonstrar o que está sentindo, porém, acredito que não precisa disso para identificar quando ele está feliz ou triste, basta olhar as expressões emitidas pelas telas dos olhos e da boca. Recomendo pesquisar no Google: “Super Mario Lego”, acredito que vais ficar surpreso e feliz, por ter disponível no mercado, com esse novo agente! E, tente imaginar o que pode ser feito e estudado com esse agente nas mais diversas áreas.

Por fim, finalizo esse post da série “Como simular emoções em agentes” informando que existem muitos robôs no mercado, cada um com suas características e capacidades de expressar emoções, e que seria impossível citar todos eles. Porém, tentei explorar alguns poucos dos agentes robóticos com os quais trabalhei, ouvi falar ou que cairam de paraquedas nas minhas timelines da vida. Nessa série, mostrei exemplos de estudos com robôs, desde os mais complexos, caros e cheios dos paranauês, até aos mais simples e baratos, que conseguiram demonstrar emoções. Essas, podendo serem percebidas através de pequenos movimentos corporais, ou com o uso de sons, luzes, ou ainda, ter uma aparência mais fofa. E que, até uma simples esfera, com pequenos movimentos e sensores consegue fazer com que uma pessoa ache que esse objeto tem emoções ou sentimentos.
Espero que com essa série eu tenha conseguido ativar em você, nobre entusiasta, um desejo em querer pesquisar mais e mais sobre a área de computação afetiva e robótica que ainda é muito jovem e tem muito o que ser explorada. Espero vê-lo nas próximas postagens.
Referências:
[1] Novikova, Jekaterina, Gang Ren, and Leon Watts. “It’s not the way you look, it’s how you move: validating a general scheme for robot affective behaviour.” In IFIP Conference on Human-Computer Interaction, pp. 239-258. Springer, Cham, 2015.
[2] Golestan, Shadan, Pegah Soleiman, and Hadi Moradi. “Feasibility of using sphero in rehabilitation of children with autism in social and communication skills.” In 2017 International Conference on Rehabilitation Robotics (ICORR), pp. 989-994. IEEE, 2017.
[3] Boccanfuso, Laura, Erin Barney, Claire Foster, Yeojin Amy Ahn, Katarzyna Chawarska, Brian Scassellati, and Frederick Shic. “Emotional robot to examine different play patterns and affective responses of children with and without ASD.” In 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pp. 19-26. IEEE, 2016.
[4] Golestan, Shadan, Pegah Soleiman, and Hadi Moradi. “Feasibility of using sphero in rehabilitation of children with autism in social and communication skills.” In 2017 International Conference on Rehabilitation Robotics (ICORR), pp. 989-994. IEEE, 2017.