
Olá leitor, vamos seguir a série de posts sobre como simular emoções em agentes, lembrando que quando menciono agentes estou me referindo a um agente físico, como um robô. É importante ressaltar que no post anterior (se não leu clique aqui) citei estudos que utilizaram robôs considerados “cute” em sua aparência como uma forma de criar empatia e fazer com que as pessoas percebessem como se fossem seres vivos. Em outras palavras, a aparência pode ser considerado um fator importante para que pessoas percebam emoções nos robôs. É claro, que o movimento do corpo, assim como, emitir sons e ter sensores espalhados no corpo para que o agente responda ao estímulo da pessoa ajudam a obter essa percepção.
Seguindo nessa linha, existem alguns robôs que são mais conhecidos pela comunidade acadêmica e alguns deles você deve ter visto em algum outdoor ou propaganda. Vamos a um exemplo que é muito utilizado, inclusive em escolas de ensino fundamental para o aprendizado em robótica e, se for bem utilizado, ele pode ser utilizado para muitas outras disciplinas. Estou falando do robozinho chamado Nao.

O Nao foi criado pela empresa Aldebaran Robotics e agora é desenvolvido pela Softbanks Robotics. Esse robô é considerado um humanóide (pois tem aparência semelhante ou lembra um humano) e é um dos mais utilizados para pesquisa. Isso se deve ao fato, dele ter uma aparência agradável, ser transportável (tem 59 cm de altura com 4.3 kg), e facilmente programável. A empresa desenvolvedora fornece um toolkit próprio e intuitívo para desenvolver movimentos e ações para o Nao. Além disso, é possível utilizar outras ferramentas para desenvolver um comportamento para o Nao dependendo de cada situação como o framework ROS. Esse agente tem uma série de sensores de toque instalados em vários locais do seu corpinho, além de ter microfones, caixas de som, cameras, um processador e memória interna, fora outras características impressionantes, como, ensinar a fazer Tai Chi. E, se você quer ficar de boca aberta, faz uma pesquisa rápida no Youtube por “Nao Thriller” (isso mesmo que deves estar se perguntando, é Thriller do Michael Jackson!!!) ou Gangnam Style.
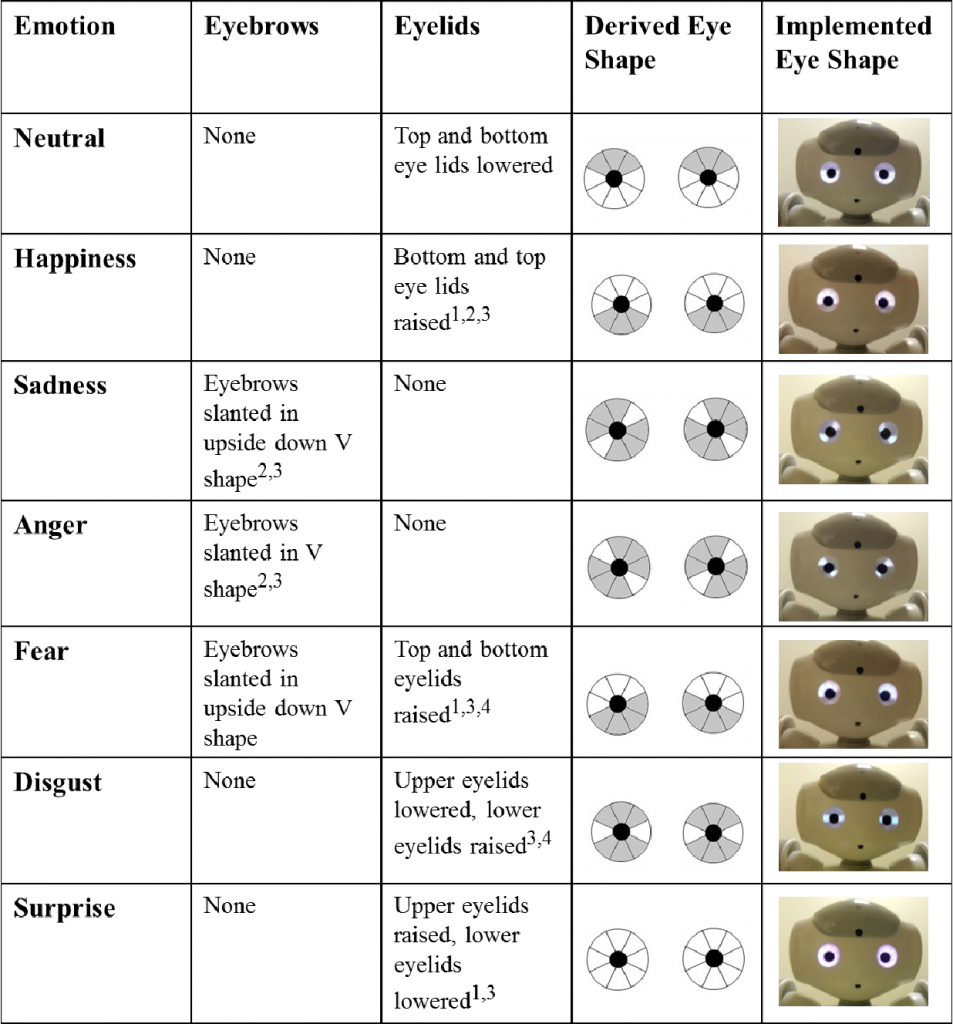
Mas vamos deixar as danças de lado, não é só para dançar que o Nao pode ser utilizado, trabalhei em um projeto onde esse robô foi utilizado para auxiliar no desenvolvimento da escrita das crianças [1]. Em um cenário desenvolvido para esse propósito, as crianças interagiam com o Nao como se eles fossem os professores do robô, corrigindo as dificuldades de escrita que o agente robótico apresentava. Havia duas condições, na primeira, a cada interação o Nao mostrava que estava aprendendo, ou seja, melhorando sua escrita, na outra condição o agente não apresentava essa melhora. Os resultados obtidos pelos autores sugerem que as crianças aprenderam mais na condição em que o agente se mostrava aprender também. O uso do Nao pode ser observado em vários estudos para os mais diversos fins, como para melhorar a memóra de pessoas idosas [2], ensinar ritmos músicais para crianças com autismo [3], dentre outras centenas de projetos. Isso pode se dever ao fato, da sua facilidade de desenvolvimento, do seu custo (que entre os robôs mais avançados é um dos mais baratos), da sua aparência (que não deixa de ser apelativa) e dos recursos disponíveis para demonstrar algum sentimento. Esses recursos são desde seu corpo com mãos, braços e pernas, e os leds nos olhos, que podem ser vermelho quando estiver zangado, verde expressando um comportamento de alegria ou uma combinação de acendimento de leds como demonstrado no trabalho Greczek e colegas [4].


Outro robô também criado e desenvolvido pelas mesmas empresas do Nao, mas que é considerado um dos mais avançados é o Pepper. Esse é um robô semi-humanoide com habilidades para ler emoções. Isso mesmo pequeno padawan, o Pepper tem capacidade de detectar emoções através da análise de expressões faciais e tons de vozes. Inclusive, Ilyas e colegas [5] pesquisaram formas de ensinar ao Pepper a reconhecer emoções de pacientes que sofreram lesão cerebral. Pepper tem 1 metro e 20 centímetros de altura e pesa 28 kg, conta com uma série de sensores, cameras, microfones, e outros equipamentos. Pepper está sendo utilizado no Japão e no reino unido para auxiliar as pessoas em passeios em museus e receber consumidores em shoppings. Além de ter equipamentos para simular emoções, como seus braços, movimento corporal, olhos com leds bem grandes, emitir sons, etc.. ainda conta com uma tela de 10”. A tela pode ser um recurso muito útil para demonstrar que o agente ficou com surpresa ou feliz com determinado comportamento da pessoa que está interagindo.

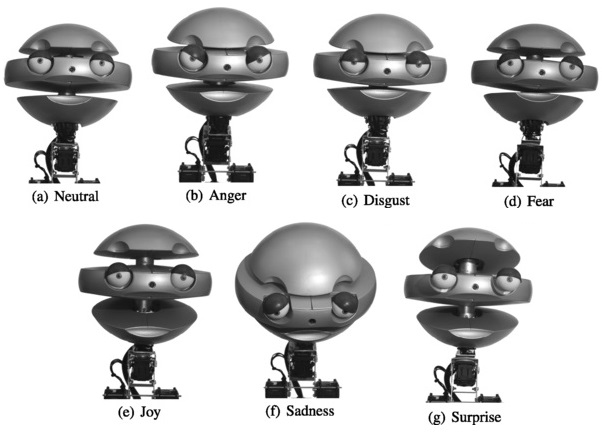
Um robô que conheci no meu doutorado foi o iCat desenvolvido pela empresa holandesa Philips. Como o nome diz, é um agente personificado em forma de um gato que utiliza expressões faciais para simular e expressar emoções. De acordo com seus desenvolvedores, o iCat tem um conjunto de regras para movimentar as peças de sua face com capacidade de formar 22 emoções, como zangado, gratificação, medo, alegria, dentre outros. Por essa capacidade de expressar emoções, esse robô já foi utilizado em diversos estudos, por exemplo, Pereira e colegas [6] utilizaram ele para jogar xadrez contra pessoas. Nas condições propostas pelos autores o participante jogaria contra o iCat virtual e em outra condição com o robô físico. Os resultados apresentaram evidências de que os participantes que jogaram contra o robô físico tiveram uma experiência mais prazerosa do que os que jogaram contra a versão virtual.
O último agente robótico que irei descrever nesse post mora em meu coração. Isso se deve ao fato de ele ter sido utilizado na maioria dos meus experimentos que serviram para validar as hipóteses levantadas na minha tese de doutorado. Esse robô foi desenvolvido por Michal e Jan para operar de forma autonoma e ser um companheiro aceitável. O robô que estou mencionando é chamado de Emys (acrônimo de EMotive headY System), que é apenas uma cabeça com capacidade de executar expressões faciais que conseguem fazer com que a pessoa que está interagindo com ele acredite que o robô está sentindo algo. Além disso, ele tem uma série de sensores, uma camera e motores que fazem a cabeça se movimentar para frente e para trás e para os lados.
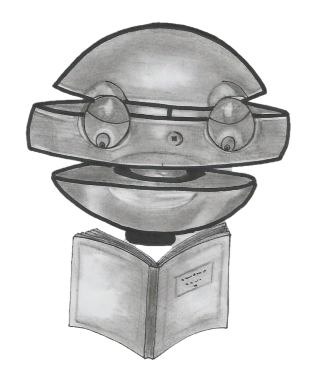
Por ter essa incrível capacidade de expressar emoções através de expressões faciais, utilizei o Emys nos cenários que desenvolvi no meu curso de doutorado. Os cenários consistiam basicamente em ter um agente robótico contando histórias para o participante (quem sabe um dia eu faço um post com maiores detalhes sobre a minha tese). Como o cenário é uma narrativa, é importante que o contador de histórias (storyteller) consiga fazer “caras e bocas” para que o ouvinte se sinta imerso dentro da história criada. Além disso, essa capacidade é importante para que o storyteller consiga demonstrar para o ouvinte as emoçoes que se deseja obter em cada parte da história, como risos em uma parte engraçada. Posso afirmar, que o Emys é um robô incrível para os mais diversos objetivos, seja contar histórias, jogar cartas [7], persuadir as pessoas a tomarem certa decisão [8], entre outros.

O Emys está em sua segunda versão, agora branquinho, tem uma tela de 6.1” que pode ser utilizada para os mais diversos fins e os olhos não são mais mecânicos, são displays LCDs permitindo uma maior gama de configurações. De acordo com seus desenvolvedores, o Emys auxilia no aprendizado de novas linguas, aumentando o vocabulário dando recompensas e informando o progresso da pessoa. Além disso, ele tem reconhecimento facial, multimidia para jogos interativos, conta histórias, e muitas outras coisas. Poderia fazer um post inteirinho sobre o Emys, pois como trabalhei com ele durante 3 anos, sei bem da capacidade desse robô e em que ele pode ser utilizado. Quem sabe em um futuro eu faça esse post!

Sei que tinha dito que o último robô seria o Emys, mas tenho que fazer uma menção honrosa para o robô Asimo. Esse é um dos robôs mais caros e mais completos que existe, sendo um sonho de consumo para pesquisadores terem em seu portfolio para estudos. Asimo é desenvolvido e fabricado pela Honda tem 1 metro e 30 cm de altura pesando 54 kg. Esse robô já jogou bola com o Obama, já contou histórias no estudo de Mutlu e colegas [9], já conduziu uma orquestra, entre outras tarefas. Na minha percepção o Asimo é um dos robôs mais completos que eu tenho conhecimento, porém, é para poucos, em 2015 ele custava a bacatela de $2 milhões e meio de DÓLARES!!!
Finalizando esse post, posso mencionar que existem muitos outros robôs com diversas características semelhantes aos que foram citados aqui, porém, quis apenas descrever de forma sucinta alguns que trabalhei e que tenho um pouco de conhecimento. Espero que tenhas gostado e se surpreendido com a capacidade do que os robôs podem fazer nos dias de hoje. Neste post mostrei robôs que utilizam expressões faciais, movimentos corporais, olhos com leds em cores, display integrado ao corpo, conjunto de sensores e cameras. No próximo post dessa série irei mostrar outros robôs que conseguiram fazer com que uma pessoa achasse que o agente tivesse algum sentimento. Entretanto, diferente dos que já foram apresentados, irei mostrar robôs sem tantos recursos tecnológicos, ou seja, mais simples. Até a próxima.
Referências:
[1] Chandra, Shruti, Raul Paradeda, Hang Yin, Pierre Dillenbourg, Rui Prada, and Ana Paiva. “Do Children Perceive Whether a Robotic Peer is Learning or Not?” In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, pp. 41-49. 2018.
[2] Pino, Olimpia, Giuseppe Palestra, Rosalinda Trevino, and Berardina De Carolis. “The humanoid robot nao as trainer in a memory program for elderly people with mild cognitive impairment.” International Journal of Social Robotics 12, no. 1 (2020): 21-33.
[3] Gifford, Timothy, Sudha Srinivasan, Maninderjit Kaur, Dobri Dotov, Christian Wanamaker, Gregory Dressler, Kerry MARSH, and Anjana BHAT. “Using robots to teach musical rhythms to typically developing children and children with autism.” University of Connecticut. 2011.
[4] Greczek, Jillian, Katelyn Swift-Spong and Maja J. Mataric. “Using Eye Shape to Improve Affect Recognition on a Humanoid Robot with Limited Expression.” 2011.
[5] Ilyas, Chaudhary Muhammad Aqdus, Viktor Schmuck, Muhammad Ahsanul Haque, Kamal Nasrollahi, Matthias Rehm, and Thomas B. Moeslund. “Teaching Pepper Robot to Recognize Emotions of Traumatic Brain Injured Patients Using Deep Neural Networks.” In 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), pp. 1-7. IEEE, 2019.
[6] Pereira, André, Carlos Martinho, Iolanda Leite, and Ana Paiva. “iCat, the chess player: the influence of embodiment in the enjoyment of a game.” In Proceedings of the 7th international joint conference on Autonomous agents and multiagent systems-Volume 3, pp. 1253-1256. 2008.
[7] Correia, Filipa, Patrícia Alves-Oliveira, Tiago Ribeiro, Francisco S. Melo, and Ana Paiva. “A social robot as a card game player.” In Thirteenth Artificial Intelligence and Interactive Digital Entertainment Conference. 2017.
[8] Paradeda, Raul, Maria José Ferreira, Carlos Martinho, and Ana Paiva. “Would You Follow the Suggestions of a Storyteller Robot?.” In International Conference on Interactive Digital Storytelling, pp. 489-493. Springer, Cham, 2018.
[9] Mutlu, Bilge, Jodi Forlizzi, and Jessica Hodgins. “A storytelling robot: Modeling and evaluation of human-like gaze behavior.” In 2006 6th IEEE-RAS International Conference on Humanoid Robots, pp. 518-523. IEEE, 2006.
Pingback: Como simular emoções em agentes (parte III)? – IA Expert